
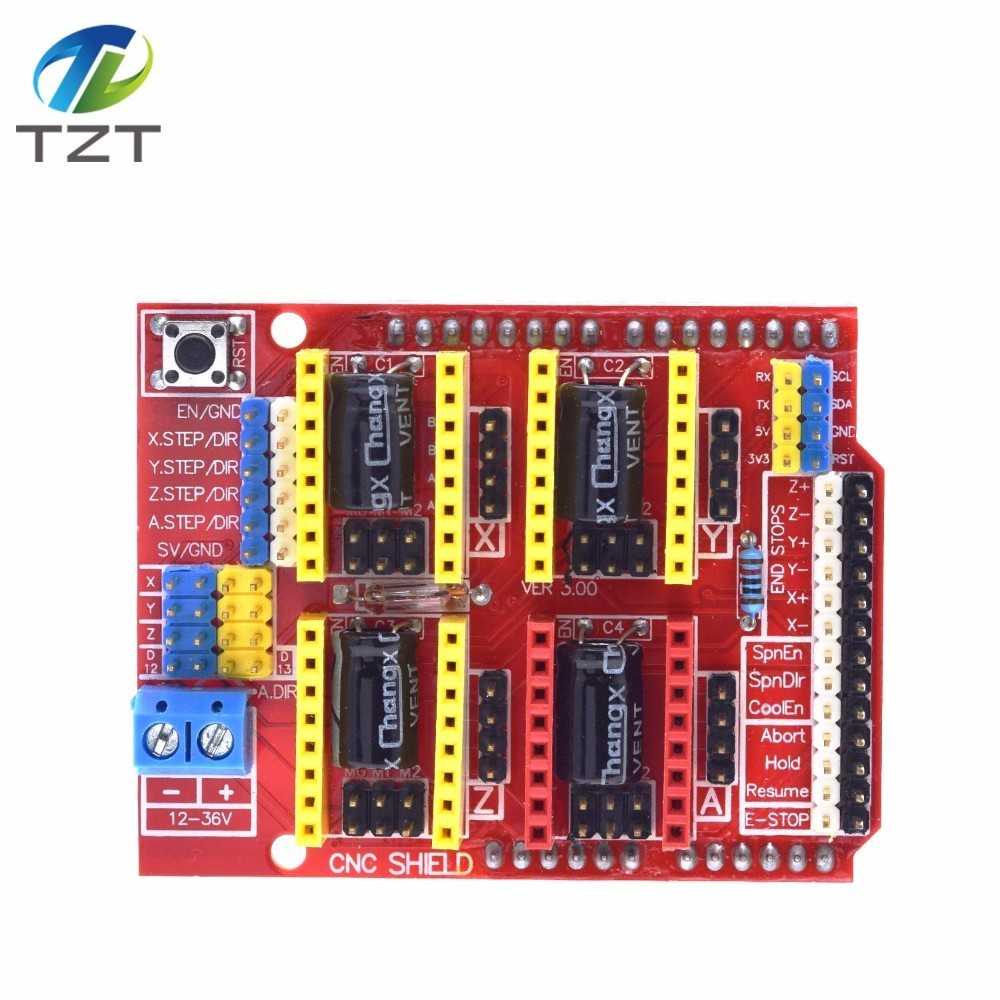
The basic needs of the stepper motor control other pins are in the engraving machine, or3DWhen the printer was used, here we do not make Detailed,IOIt corresponds to the above figure.
Expansion board UNO ----------------------
8 ------------------------ EN (stepper motor drive enable, active low)
7----------------------- Z.DIR (Z-axis direction control)
6----------------------- Y.DIR (Y-axis direction control)
5----------------------- X.DIR (X-axis direction control)
4 ---------------------- Z.STEP (Z-axis stepper control)
3 ---------------------- Y.STEP (Y-axis stepper control)
2 ---------------------- X.STEP (X-axis stepper control)
// Here is a simple stepper motor control procedures,
#define EN 8 // stepper motor enable, active low
#define X_DIR 5 // X axis stepper motor direction control
#define Y_DIR 6 // y-axis stepper motor direction control
#define Z_DIR 7 // z-axis stepper motor direction control
#define X_STP 2 // x-axis stepper control
#define Y_STP 3 // y-axis stepper control
#define Z_STP 4 // z-axis stepper control
/ *
// Function: step function: to control the stepper motor direction, the number of steps.
// Parameters: dir direction control, dirPin DIR pin corresponding to the stepper motor, stepperPin step pin corresponding to the stepper motor, stepping a few steps steps
// No return value
* /
void step (boolean dir, byte dirPin, byte stepperPin, int steps)
{
digitalWrite (dirPin, dir);
delay (50);
for (int i = 0; i
digitalWrite (stepperPin, HIGH);
delayMicroseconds (800);
digitalWrite (stepperPin, LOW);
delayMicroseconds (800);
}
}
void setup () {// the stepping motor used in the IO pin is set to output
pinMode (X_DIR, OUTPUT); pinMode (X_STP, OUTPUT);
pinMode (Y_DIR, OUTPUT); pinMode (Y_STP, OUTPUT);
pinMode (Z_DIR, OUTPUT); pinMode (Z_STP, OUTPUT);
pinMode (EN, OUTPUT);
digitalWrite (EN, LOW);
}
void loop () {
step (false, X_DIR, X_STP, 200); // X axis motor reversal lap, 200 steps for the circle
step (false, Y_DIR, Y_STP, 200); // y-axis motor reversal lap, 200 steps for the circle
step (false, Z_DIR, Z_STP, 200); // z-axis motor reversal lap, 200 steps for the circle
delay (1000);
step (true, X_DIR, X_STP, 200); // X-axis motor is transferred lap, 200 steps to circle
step (true, Y_DIR, Y_STP, 200); // y-axis motor is transferred lap, 200 steps to circle
step (true, Z_DIR, Z_STP, 200); // z-axis motor is transferred lap, 200 steps to circle
delay (1000);
}







China (Mainland)
 TUOZHANTENG electronic components Co., LTD
TUOZHANTENG electronic components Co., LTD
 0755-82527072
0755-82527072
 emily@tztstore.com
emily@tztstore.com
 3013 Hongli Road, Shanghang Building 5F/511, Huaqiangbei , Futian , Shenzhen , Guangdong , China.
3013 Hongli Road, Shanghang Building 5F/511, Huaqiangbei , Futian , Shenzhen , Guangdong , China.
Hong Kong,China
TUOZHANTENG HK CO., LTD
1244995775@qq.com
Room 1103, Hang Seng Mongkok Building, 677 Nathan Road, Mongkok, Kowloon, Hong Kong
WhatsApp +86 15920041318
![]() WeChat +86 15920041318
WeChat +86 15920041318
Telegram/ KakaoTalk :+86 15920041318
Website customer service

Tel
